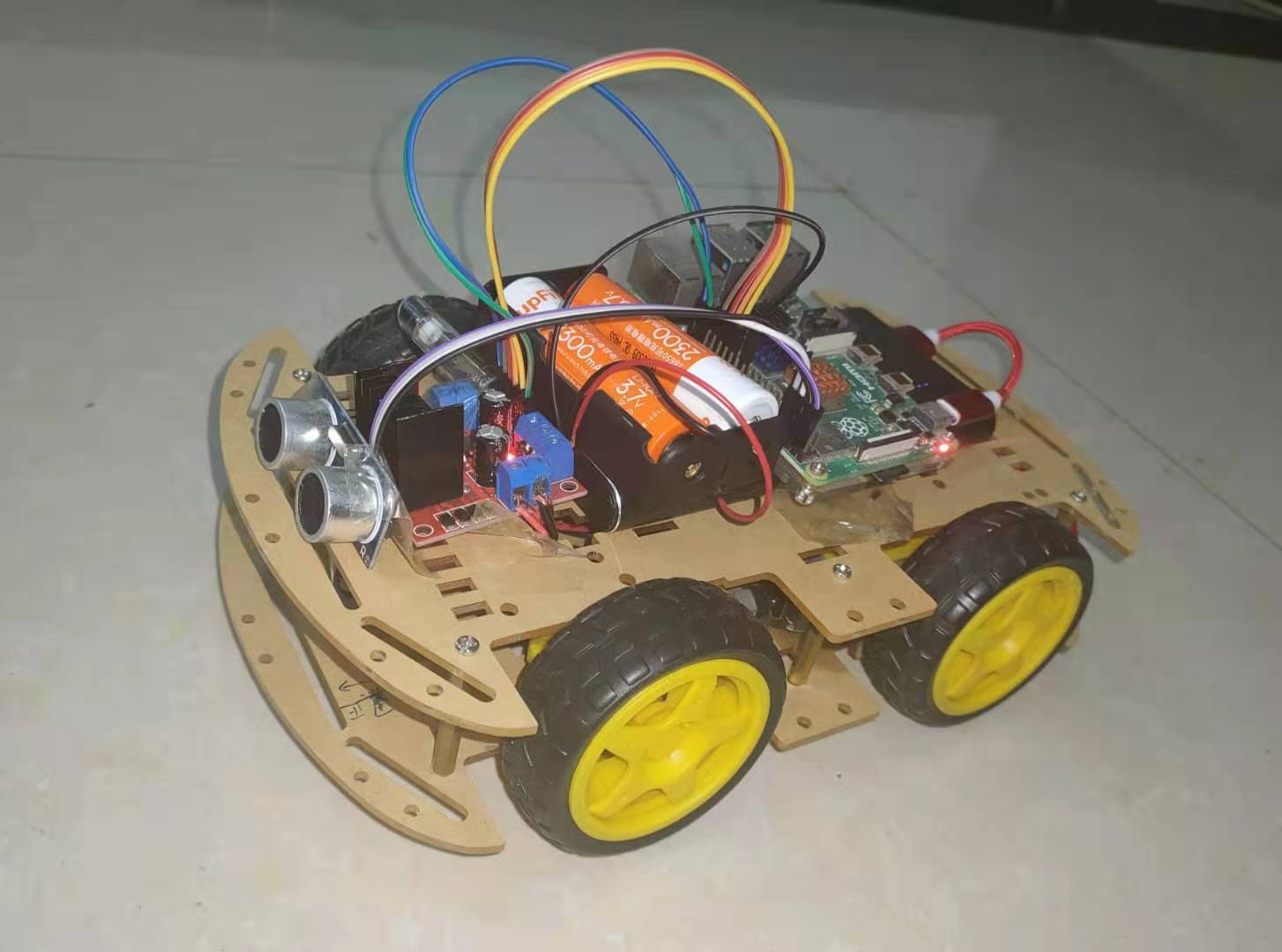
树莓派小车
树莓派防吃灰玩具
代码地址:github.com/Sanzo00/pi-car
树莓派配置:sanzo.top/RaspberryPi/raspi-setup
功能展示
远程控制小车

PWM变速
小车在低电压情况下跑的比较慢,因此增加变速的功能。

超声波自动避障
这里使用超声波测距模块(HC-SR04)实现距离检测,在此基础上实现一个简单的自动避障逻辑。
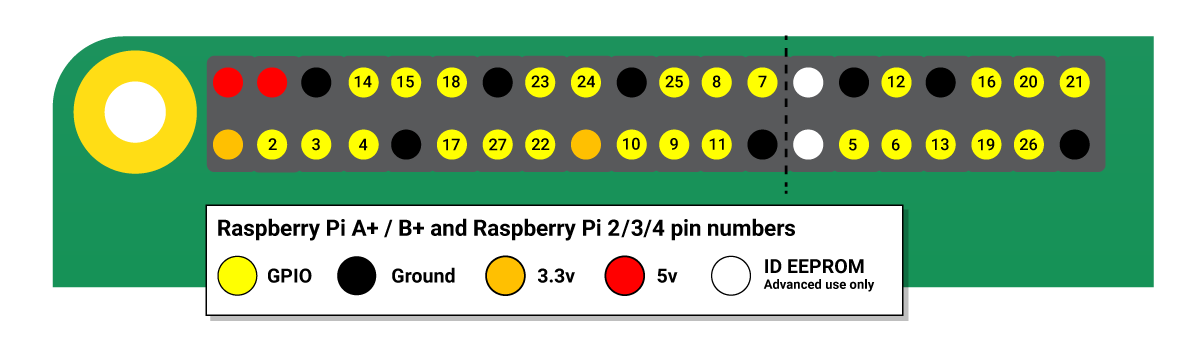
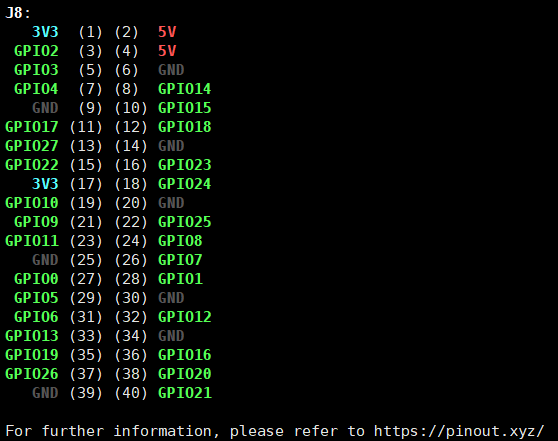
GPIO
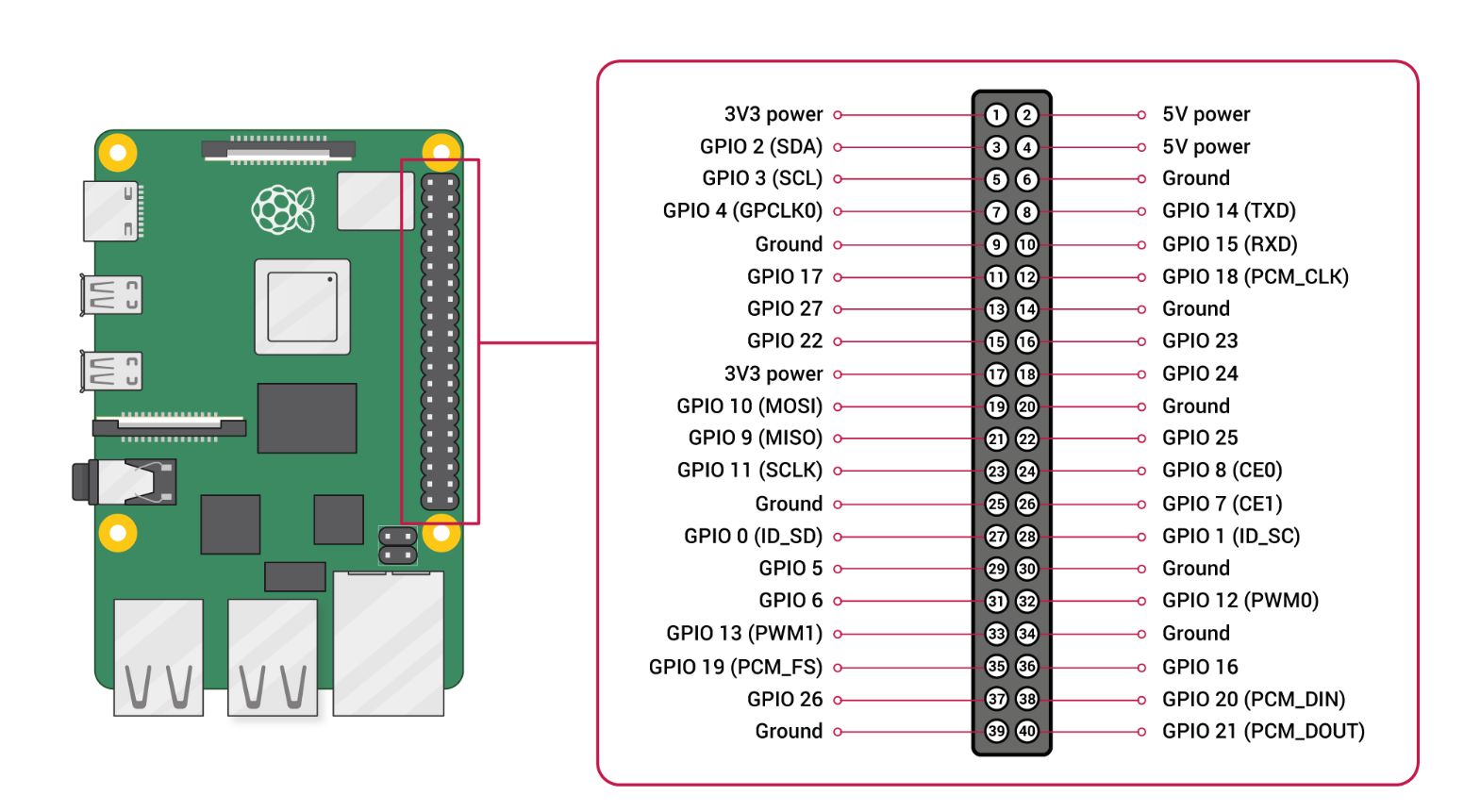
pinout
1 | sudo apt install python3-gpiozero |
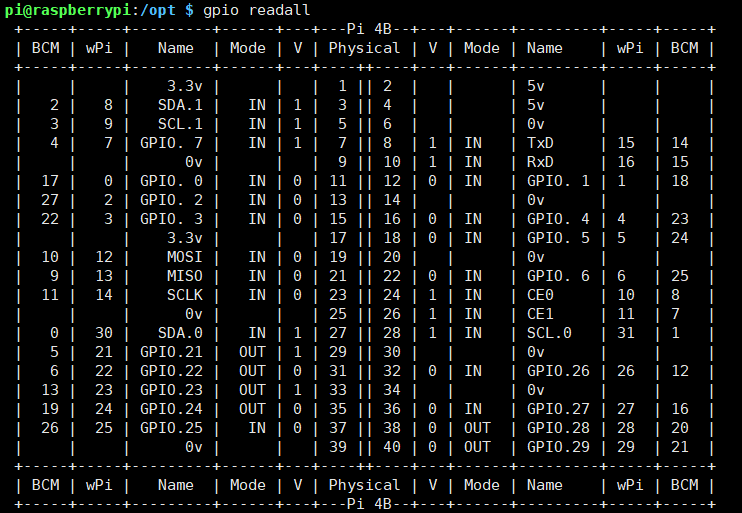
gpio readall
1 | wget https://project-downloads.drogon.net/wiringpi-latest.deb |
材料与安装
| 名称 | 数量 | 规格 |
|---|---|---|
| 树莓派4B | 1 | 4G |
| L298N电机驱动模块 | 1 | |
| 直流减速电机 | 4 | 工作电压:3-6V,减速比:1:48 |
| 神火18650 | 2 | 3.7V |
| 充电宝 | 1 | 5V3A |
| HC-SR04 | 1 | 2cm-400cm |
L298N
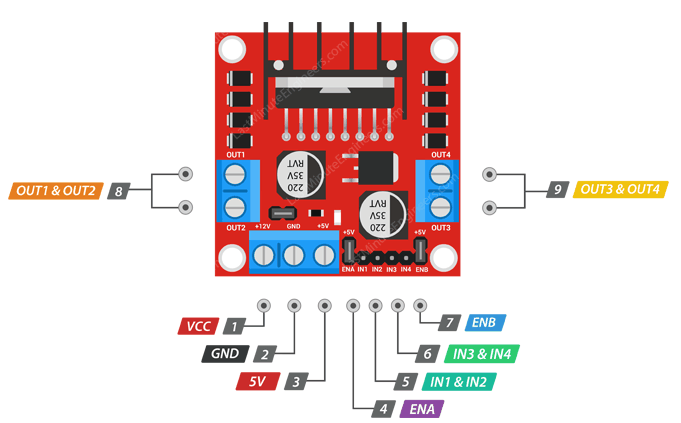

接线
这里使用树莓派的GPIO的BCM编号。
IN1、IN2、IN3、IN4分别接到树莓派的5、6、13、19上。
ENA、ENB接到树莓派的20、21。
HC-SR04

测距原理
将Trig置为高电平10us,HC-SR04发送8个40khz的方波,并检测是否有信号返回,此时Echo为高电平,若有信号返回,Echo自动置为低电平,Echo高电平持续的时间既是超声波从发射到返回的时间,最后利用声波公式计算距离$dis = \frac{time\space \times \space 340m/s}{2}$。
接线
VCC接树莓派或L298N的5V电源。
GND接树莓派GND。
Echo、Trig接树莓派GPIO 14、15。
电源
树莓派和L298N都单独供电,树莓派使用的是5V3A的充电宝供电,L298N使用电池盒供电。
电池盒的正极和负极,分别接到L298N的+12V、GND。
因为都是单独供电,所以将L298N的GND和树莓派的GND相互连接,这样方便同步逻辑信号。
HC-SR04使用树莓派的5V电源。

